источник
http://twentysix.ru/blog/103390.html (кстати, офигенный сайт с кучей шикарного вело-видео)
Один мой товарищ, серфя интернет наткнулся на сайт с вечными вопросами, наподобие, почему лед скользкий. Там же была министатья со ссылкой на
оригинальное исследование, почему же велосипед едет. Оказывается, большие дяди от науки, отвлекаясь от элементарных частиц и от священной нанофизики, уделяют время и этому вопросу. Они создали модель велосипеда свободную от двух самых больших «помощников» велосипедиста: гироскопического эффекта и наклона вилки переднего колеса (кастора)… и даже эта модель оказалась стабильна!
Что такое устойчивость и зачем она нужна?
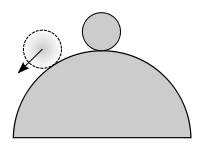
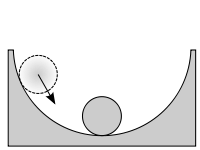
Велосипедист на покоящемся велосипеде изначально находится в состоянии неустойчивого равновесия. Любое возмущение приведет к выходу из неустойчивого равновесия – в нашем случае на землю, где он будет пребывать, сколько захочет. Внизу примеры неустойчивого и устойчивого равновесий.
Но все меняется, когда велосипед едет. В этом случае, если велосипед захочет упасть, его переднее колесо поворачивается так, чтобы восстановить вертикальное положение. Причем, это возвращение заложено в саму физику велосипеда, так что райдеру, на самом деле, и делать ничего не нужно. Велосипед, разогнанный до определенной скорости (в статье приводится значение в 15-20 км/ч), может ехать в стабильном вертикальном положении и без велосипедиста.
Из-за того, что велосипед стабилен лишь в движении, но не в покое, можно сказать, что эта система устойчива динамически.
Что помогает велосипеду возвращаться в изначальное положение?
Два эффекта, вносящих наибольший вклад – это
гироскопический эффект и
кастор переднего колеса.
Гироскопический эффект – эффект, возникающий во вращающихся системах, обладающих определенным угловым моментом, когда пытаются изменить направление оси вращения. Сила, возникающая в таком случае, называется гироскопической силой. Гироскопический эффект нетривиально объяснить, но его легко почувствовать. Самый простой эксперимент, который каждый из вас может поставить в домашних условиях, – это взять колесо велосипеда за ось, раскрутить и попробовать помахать им в воздухе. Вы почувствуете силу. Причем, чем больше раскрутите колесо, тем больше сила. На этой же силе основана тренировка с powerball, только система там немного оптимизированнее. Когда вы наклоняете велосипед – наклоняется и ось переднего колеса, колесо за счет гироскопического эффекта поворачивает в сторону наклона.
Кастор в нашей литературе – это угол наклона оси поворота автомобиля. Там это: caster effect, castor и т.д. Наш угол наклона рулевой – тот же кастор.
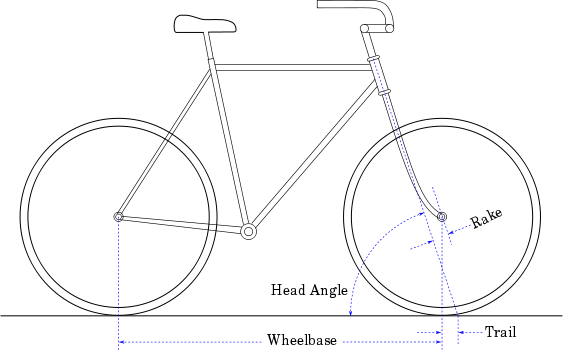
Существование кастора приводит к тому, что точка контакта переднего колеса находится за воображаемой точкой пересечения линии вилки и земли. Это приводит к так называемому «следу» или trail переднего колеса. Эффект от такой геометрии вы можете наблюдать на тележках в ашанах: колесо всегда стремится волочиться за тележкой. При стабилизации это проявляется в том, что при наклоне велосипеда переднее колесо стремится «провалиться» в сторону наклона велосипеда, тем самым, поворачивая колесо в сторону
А что если?..
А что если убрать эти два эффекта? J. D. G. Kooijman, J. P. Meijaard, Jim M. Papadopoulos, Andy Ruina, и A. L. Schwab собрали модель велосипеда, в которой оба эффекта отсутствуют – two-mass-skate (TMS).

Они сильно уменьшили след колеса и перевернули его задом наперед, уменьшили размеры колес и добавили вторичные, которые крутятся в другую сторону, чтобы исключить гироскопический эффект.

И как видно из видео, модель все еще оказывается стабильной!
Выводы
А выводы достаточно размыты. Во-первых, если исключить кастор и гироскопический эффект, то силы, которые могут стабилизировать велосипед, должны возникнуть из взаимодействия колеса с поверхностью при движении. Во-вторых, хоть кастор и гироскопический эффект и не обязательны, их нельзя рассматривать изолированно, т.к. со слов авторов можно построить системы, которые при наличии только одного из эффектов окажутся нестабильными на любых доступных человеку скоростях. Т. е. для стабильности важно взаимодействие этих двух эффектов. Это значит, что нет универсальных схем для всех типов байков, что дает большой простор для производителей и маркетинга.
Ps. Когда разбирался в этой статье, наткнулся на обширную
статью на EnWiki про вело- и мотодинамику, о том, какие силы влияют на движение байка, про разные эффекты, геометрии и т.д. с количеством ссылок > 50. При желании могу пересказать ее по частям сюда.






